 简体中文
简体中文


受到折纸的启发,哈佛大学的研究人员与索尼合作,打造了一个非常迷你的外科手术机器人。
该机器人只有网球大小,大概只有硬币那么重。在过去,针对一些复杂精细的手术,外科医生需要使用工具,在小切口中插入微型摄像头来进行操作,以此确保患者和医生双方的安全。很多研究也一直致力于为手术室研发机器人,帮助外科医生执行手术。
不过,一直以来,这些机器人外科医生往往体积很大,甚至会占据整个手术室。 对于一些需要精细动作的手术操作,小型机器人更排的上用场。
当然,它的特点不仅是小——在《自然机器智能》上发表的一项研究中,研究人员描述了它如何执行棘手的模拟外科手术任务。和人类外科医生相比,该机器人可以实现更加准确地操作。
据学院官网显示,
该微型机器人由哈佛大学的Robert Wood博士和索尼公司的机器人工程师铃木弘之合作研发。值得一提的是,他们是在折纸的启发下创造出了这个微型远程运动操纵器(“mini-RCM”),将外科手术机器人技术应用到了微观领域。
研究人员发表的一份声明显示,在用特殊的层压材料进行激光切割后,这种微型机器人外科医生可以像创意生日贺卡一样“弹出”,最终变为某种形状。研究团队称,如果不通过这种方式,构建出如此复杂的三维形状非常困难。
图片来源:Wyss Institute at Harvard University
更重要的是,这个机器人比以前学术界开发的其他显微外科手术设备更小、更轻。
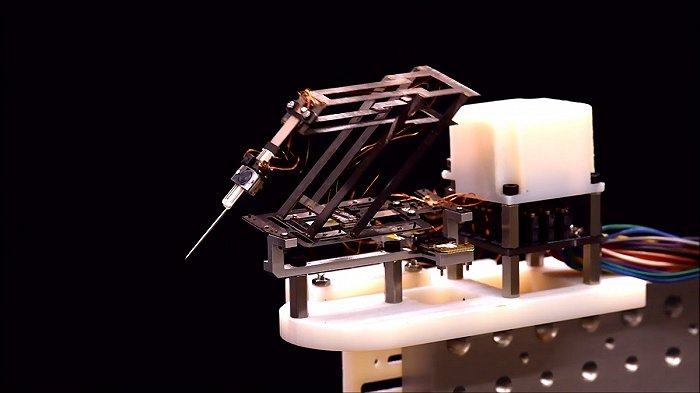
如上图所示,这个机器人具有三个线性致动器(mini-LAs),使其可以上下移动、左右旋转以及伸缩。
就本身材料来说,这个微型机器人由特殊的陶瓷材料制成,在对这种材料施加电场时,物体就会变形,因此,团队将基于LED的光学传感器集成到mini-LA中,从而检测和纠正移动的偏差(例如由于手部震动引起的误差),确保其正确执行任务。
早期进行的测试表明,该机器人比人类外科医生拥有“更加稳定的手”,同时也能更加准确地完成手术操作。测试中,它甚至能够成功刺穿一条模拟的视网膜静脉,其厚度仅为人类头发厚度的两倍左右,且在刺穿过程中没有造成损害。
对于和哈佛的合作,铃木也表示,伍德实验室(The Wood lab)在制造微型机器人方面具有独特技术能力,在过去几年中带来了许多令人印象深刻的发明。实际上,他从2018年开始就和伍德实验室合作开发小型RCM,“这是哈佛和索尼合作的一部分。”
此前,哈佛大学还研究出许多不同类型的微型机器人,比如由碳纤维材料打造、内部装有微型芯片的仿真蜜蜂机器人,可以在灾区进行一些搜救工作。在不远的将来,这些十分迷你的机器人或许将真正改变我们的生活。




