 简体中文
简体中文

机器人能自己学会走路了。
3月4日,据国外科技媒体Tech Xplor报道,谷歌(Google)、佐治亚理工学院(Georgia Institute of Technology)和加州大学伯克利分校(UC Berkeley)的研究人员联合发表了一篇论文,详细介绍了他们构建的一个通过AI技术自学走路的机器人。
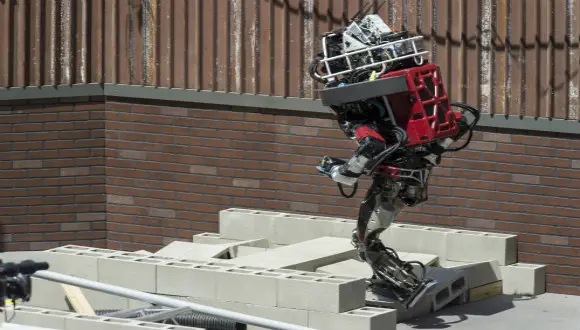
这个四足机器人名为Rainbow Dash,它只需花费约数个小时,就能自己学会向前、向后以及左右转弯等运动。
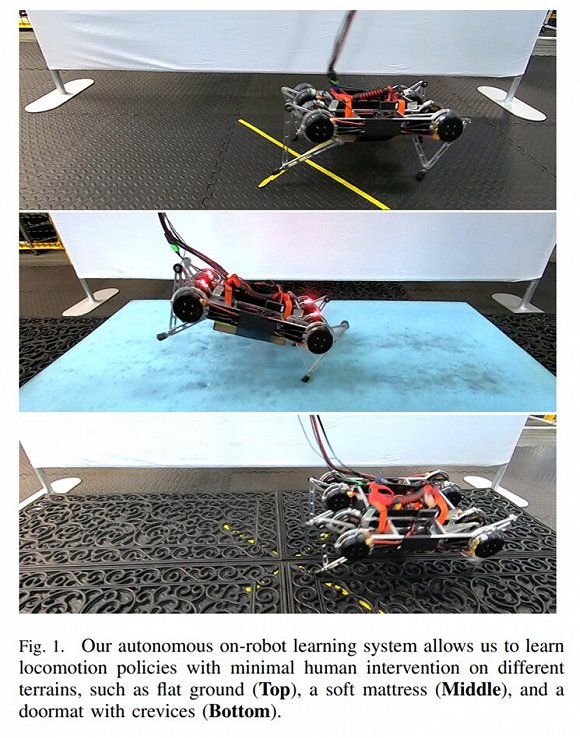
论文中的测试数据显示,Rainbow Dash在坚硬平坦的地面上学会走路只需要1.5个小时,在记忆海绵材质的床垫上约需5.5个小时,在镂空的地毯上约需要4.5个小时。
四足机器人名为Rainbow Dash图片来源:Tech Xplor
此前,大多数机器人的强化学习都是在建模的仿真环境中进行,直到虚拟机器人的算法足够完善,可以安全运行,研究人员才会将搭载该算法的机器人放置在现实环境中实验。机器人在行走时,通常需要人为干预,如跌倒时,需要有人扶起来。
这种方法可以避免机器人在反复实验的过程中,对周围环境造成损害。但建模一般耗时长、费用高,且现实环境复杂多变。
将机器人直接放在现实环境中进行训练,能够让它们很好地适应自己所处的环境以及相似环境,但这需要技术的帮助。
Rainbow Dash结合了深度学习和强化学习两种不同类型的AI技术,具备直接放置于真实环境中进行训练的条件。
该机器人没有任何专门的教学机制,例如,人工指导或输入有标签的培训数据等。它完全依靠深度学习和强化学习技术。
深度学习技术可以使机器人系统处理和评估其身处的环境,从而获得原始数据,并组织已有的知识结构使之不断改善自身的性能。
强化学习技术则可以使机器人的算法反复试验、学习如何执行任务,并根据完成的程度来获得奖励。也就是说,当机器人擅长执行某个步骤时,其奖励会增加,从而创建一种反馈机制,促使机器人学习最佳方法。
不过,Rainbow Dash并没有完全失去人类的干预。当它不小心离开了原本要学习的空间,研究人员会对其进行干预。例如,研究人员创建了边界,机器人可以在该边界内学习走路,以防止它离开该区域。
同时,研究人员还设计了特定的算法来防止机器人摔倒。
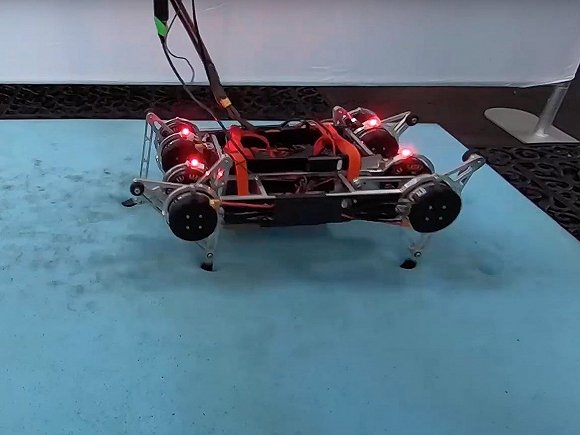
四足机器人Rainbow Dash 在学习走路。图片来源:Tech Xplor
据《商业内幕》(Business Insider)报道,谷歌研究负责人谭杰(Jan Tan)表示,这项研究花费了约一年时间才完成。
谭杰称,该研究仍处于早期阶段。下一步,研究人员计划在各种各样的机器人上,以及更多样化的环境中测试这一学习系统。
据Tech Xplor报道,斯坦福大学助理教授切尔西·芬恩(Chelsea Finn)表示,将人类干预从机器学习的过程中撤离,是件很困难的事情。机器人能够自主学习,将使其能够更好地适应现实生活世界,而不是在实验室里。
用AI算法让机器人具备自主学习能力,是当前许多科研人员的研究方向。
据南加州大学维特比工程学院(USC Viterbi School of Engineering)网站消息,3月11日,该校的研究人员发明了第一个模拟动物类肌腱驱动的机器人四肢。
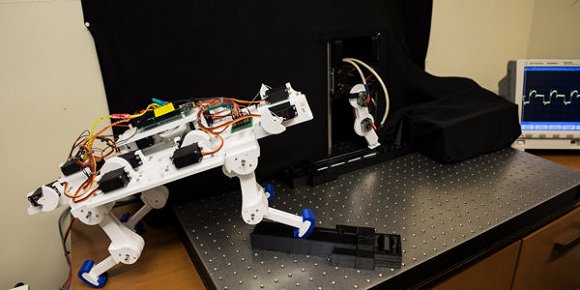
图片来源:Matthew Lin
该机器人通过算法,能构建属于自己的肢体和环境内部思维导图,并像动物一样通过三肌腱、双关节肢体等来学会如何走路,且不需要明确的编程。
南加州大学的生物医学工程师弗朗西斯科·瓦莱罗·库瓦斯(Francisco ValeroCuevas)表示,这项技术或许能为残疾人提供反应速度更快的假肢,也可能让机器人安全地进行太空任务,以及尝试进行一些搜索和救援任务等。